




供应产品
- 产品型号:BIO-12
- 所属商家:北京汉库机器人技术有限公司
- 商家类型:
- 联系方式:(已屏蔽)
- 查看更多同类产品>>

推荐您优先选择特种装备网依照《网络商品交易及有关服务行为管理暂行办法》审核认证的装备通VIP会员!
详细信息
产品简介:
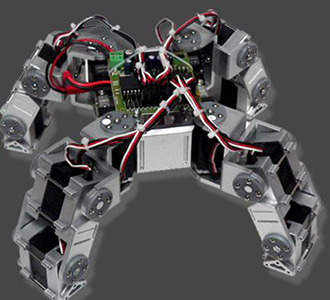
四足步行机器人的研制是一项各种技术的综合性工作, 它涉及到生物力学、 机构运动学、动力学、控制理论、计算机技术、传感技术等。其科研成果在机器人机构学、运动学以及机器人控制技术、传感技术方面有较高的学术价值。
此款机器人采用静态步态的控制方式,能实现平地前进、后退、左行、右行,增加传感器后能识别和跨越/躲避障碍,最大越障高度是10cm。步行机构结构灵巧,设计合理,腿机构选用高强度、刚性好的材料,能实现原地转弯,对有凸起和下凹地面有适应功能。
四足步行机器人的研制是一项各种技术的综合性工作, 它涉及到生物力学、 机构运动学、动力学、控制理论、计算机技术、传感技术等。其科研成果在机器人机构学、运动学以及机器人控制技术、传感技术方面有较高的学术价值。
此款机器人采用静态步态的控制方式,能实现平地前进、后退、左行、右行,增加传感器后能识别和跨越/躲避障碍,最大越障高度是10cm。步行机构结构灵巧,设计合理,腿机构选用高强度、刚性好的材料,能实现原地转弯,对有凸起和下凹地面有适应功能。














